

영양학은 활용하고 실천하고 적용하는 방법에 있어 무궁무진한 가능성을 지니고 있습니다.
영양 요구량이 나와 완전히 똑같은 사람을 찾기는 드물기 때문에, 이러한 장점을 최대한 활용하는 것이 좋습니다.
이 글이 도움이 될 수 있을 것입니다.
아침에 단백질 스무디를 마시는 건 하루를 시작하는 좋은 방법입니다.
요거트, 바나나, 아마씨, 냉동 베리를 넣어 균형 잡힌 아침 영양을 섭취해 보세요. 이 스무디는 포만감을 오래 유지시켜주고 점심때까지 에너지를 공급해 줍니다.
단, 설탕이나 인공 감미료는 넣지 마세요.
간식으로는 가공식품 대신 과일과 채소를 선택하세요. 가공식품 간식은 비타민, 미네랄, 영양가가 매우 낮지만, 과일과 채소에는 필수 영양소가 풍부합니다.
과일과 채소를 먹으면 포만감을 느끼면서도 가공식품을 소량 섭취하는 것보다 더 많은 영양소를 얻을 수 있습니다.
영양에 관한 결정을 내릴 때는 폭넓은 시각으로 접근해야 합니다.
삶의 다른 측면에서 정신과 영혼을 고려한다면, 영양에 있어서도 마찬가지로 고려해야 합니다.
샐리 팰런은 그녀의 저서 "영양의 전통(Nourishing Traditions)"에서 이러한 관점을 제시합니다.
균형 잡힌 영양 섭취를 위한 식단을 고려할 때, 저지방 우유를 꼭 포함시키세요. 우유는 우리 몸에 필요한 칼슘과 단백질을 비롯한 다양한 영양소를 제공합니다.
연구에 따르면 우유 섭취는 근육 성장뿐 아니라 건강한 체지방 유지에도 도움이 됩니다.
콩류는 영양학적으로 뛰어난 식품입니다.
단백질을 공급하고 혈당 균형을 유지하는 데 도움을 주죠. 하지만 겉보기에는 밋밋해 보일 수 있습니다.
훌륭한 레시피에 곁들이면 맛 또한 최고로 변신합니다.
렌틸콩으로는 맛있는 채소 버거를, 병아리콩으로는 후무스를, 강낭콩으로는 멕시코 요리에 풍미를
더할 수 있고, 추운 겨울날 따뜻한 완두콩 수프 한 그릇만큼 좋은 것도 없죠!
건강한 생활 습관을 유지하려면 채소 섭취량을 늘려보세요. 아기 당근은 간편한 간식이며 비타민 A와 C의 훌륭한 공급원입니다.
신선한 채소가 가장 좋지만, 냉동 채소는 통조림 채소보다 영양소가 더 잘 보존됩니다.
샐러드는 건강에 좋은 채소를 간편하고 맛있게 섭취할 수 있는 방법이지만, 드레싱은
너무 많이 넣지 않도록 주의하세요.
체중 감량을 시도할 때는 신진대사를 활발하게 유지하는 것이 매우 중요합니다.
녹차가 도움이 될 수 있습니다.
녹차에는 신진대사를 촉진하는 것으로 입증된 성분이 함유되어 있습니다.
또한, 매운 음식도 신진대사를 높이는 것으로 알려져 있습니다.
이를 위해 음식에 고추를 넣어 보세요.
집에 들여놓던 정크 푸드 간식 대신, 저녁 식사 시간이 멀었을 때나 가족들이 배고플 때 간편하게 먹을 수 있는 다양한 과일을 준비해 보세요. 베리류, 포도, 사과를 잘게 잘라 산성수에 담가두거나, 작은 바나나나 미니 바나나 등이 좋은 예입니다.
투명한 용기에 담아 냉장고나 상온에 보관하면 보기에도
좋고 먹음직스러워 보입니다.
훌륭한 영양 팁 중 하나는 자녀에게 좋은 본보기를 보이는 것입니다.
건강한 식습관을 갖는 것이 중요한데, 부모의 식습관은 자녀의 식습관에 직접적인 영향을 미치기 때문입니다.
만약 부모가 건강에 좋지 않은 음식을 먹고 식단이 엉망이라면, 자녀도 같은 습관을 따라 할 가능성이 높습니다.
건강한 식습관은 올바른 영양 섭취에서 시작됩니다.
패스트푸드, 기름진 음식이나 튀긴 음식, 그리고 첨가당이 많이 든 음식을 피하면 당뇨병, 고혈압, 비만, 심장마비, 뇌졸중과 같은 건강 문제를 예방할 수 있습니다.
영양이 어떻게 작용하는지 더 잘 알수록 더 나은 선택을 할 수 있습니다.
값비싼 "슈퍼푸드"에 현혹되지 마세요! 일반 음식도 영양가 면에서는 충분합니다.
신선한 과일과 채소, 살코기와 생선, 콩류, 견과류, 통곡물 빵과 시리얼을 가까운 시장에서 구입하여 건강에 좋은 식품을 선택하세요. 정수기를 사용하면 경제적으로 깨끗한 물을 충분히 섭취할 수 있습니다.
정크푸드는 피하고, 건강을 위해 일반적이고 건강한 음식을 충분히 드세요.
당뇨병 환자는 영양 섭취에 있어 특별한 어려움을 겪습니다.
이러한 어려움은 하루 종일 소량씩 규칙적으로 식사하는 것으로 극복할 수 있습니다.
신선한 과일과 채소는 물론 통곡물과 저지방 유제품도 중요합니다.
또한 매일 거의 같은 시간에 식사하는 것이 좋습니다.
디저트를 아예 먹지 않으려고 애쓰지 마세요. 오히려 더 먹고 싶어질 뿐입니다.
저지방 무설탕 디저트를 선택한다면 저녁 식사 후 매일 디저트를 즐길 수 있습니다.
무설탕 젤리는 가격도 저렴하고 지방 함량도 낮아 좋은 선택입니다.
개인 맞춤형 영양 계획을 세우는 것이 도움이 되지 않을까요? 이 글에서 보셨듯이, 계획을 세우는 방법은 매우 다양하며, 어떤 계획이나 식단도 똑같은 결과를 가져오지는 않습니다.
또한, 여러분의 필요와 예산에 맞춰 조정할 수 있는 다양한 선택지가 있습니다.
개가 풀을 먹을 때

도움이 되지 않는다는 걸 알면서도 계속해서 어떤 행동을 하고 있는 자신을 발견한 적이 있나요?
스크롤하세요.
잘못된 사람에게 문자를 보내셨습니다.
당신은 닫혀 있어야 했던 낡은 문들을 다시 엽니다.
생각할 필요가 없도록 항상 바쁘게 지내는 거죠.
그리고 누군가 "왜?"라고 물으면…사실 당신은 답을 가지고 있지 않죠.
네. 저도요.
최근에 이런 생각을 해 봤어요. 우리가 아직 고통을 이해하지 못할 때, 치유를 추구하기보다는 고통에서 벗어나려고 애쓰는 경우가 있잖아요. 그런데 그 고통에서 벗어나는 게 항상 옳은 길은 아니죠.
개가 조용히 풀을 뜯어 먹는 모습을 본 적 있으신가요? 언뜻 보면 이상하고, 뜬금없고, 심지어 좀 우스꽝스러워 보일 수도 있습니다.
하지만 대부분의 경우 단순히 심심해서 그런 건 아닙니다.
개들은 마음속 어딘가 불편한 느낌이 들 때 이런 행동을 합니다.
그 이유를 설명할 수는 없지만, 본능적으로 무언가 도움이 될 거라고 느끼는 거죠. 비록 일시적일지라도 말입니다.
그건… 인간이라는 존재와 아주 비슷한 느낌이에요.
때로는 우리 자신도 고통을 이해하지 못할 때가 있고, 그 고통을 마주하고, 이름을 붙이고, 치유하기보다는, 고통을 잠재울 수 있을 만큼 가까운 것에 매달리게 되기 때문입니다.
진정한 치료법은 아닙니다.
그냥 뭐라도.
때로는 관심이기도 합니다.
때로는 주의를 분산시키는 요소일 뿐입니다.
때로는 그것이 사랑일 수도 있고, 아니면 가장 쉽게 얻을 수 있는 형태의 사랑일 수도 있다.
참 미묘한 변화죠. 어느 날 아침에 일어나서 "오늘은 감정적으로 엉망이 될 거야"라고 말하는 사람은 없잖아요. 아니죠. 서서히, 조용히, 거의 무해하게 변하는 거예요.
기분이 좋지 않아요.
변하기 쉬운.
슬픈.
외로운.
트리거됨.
혼란스러운.
하지만 잠시 멈춰서 "내 안에서 무슨 일이 일어나고 있는 걸까?"라고 묻는 대신에?
그냥… 손을 뻗으면 돼.
주의를 분산시키기 위해서.
검증을 위해.
익숙한 무언가를 위해서.
혼자만의 시간을 갖고 생각을 온전히 느껴볼 수 없게 만드는 모든 것.
그래서 당신은 스크롤을 내리고, 몰아보기를 하고, 이야기를 나누지만 진실된 말은 하지 않습니다.
당신을 힘들게 한 일을 미화하고, 바쁘게 지내고, 더 크게 웃고, 모두에게 "괜찮다"고 말합니다.
하지만 마음속 깊은 곳에서는 이렇게 속삭이고 있습니다.
"뭔가 아파. 뭔가 허전해. 뭔가 부족해."
그리고 당신은 그것이 무엇인지 아직 모르기 때문에 가장 가까이에 있는 것을 계속해서 뜯어 먹습니다.
영양가가 높아서가 아닙니다.
건강에 좋아서가 아닙니다.
하지만 익숙하기 때문이죠.
명확함이 부족할 때 익숙함은 마음을 편안하게 해줍니다.
삶이 마치 제게 진실을 보여주는 것처럼, 제 의지와는 전혀 상관없는 상황들로 저를 몰아넣었던 때가 기억납니다.
온갖 노력을 다하고 생각할 수 있는 모든 방법을 다 써봤지만, 결과는 제가 기대했던 대로 나오지 않았습니다.
길을 잃은 듯했고, 좌절감에 휩싸였으며, 완전히 지쳐버렸습니다.
그 순간, 왜 이렇게 아픈지, 어디서부터 해결해야 할지 도무지 알 수가 없었어요. 그저 고통을 덜어주고 주변의 혼란에서 벗어나게 해 줄 무언가, 어떤 것이든 필요했을 뿐이었죠. 그래서 영화에 파묻혀 몰아보기를 시작했어요. 그게 유일하게 마음을 달랠 수 있는 방법처럼 느껴졌거든요.
그리고 때로는… 일시적으로 효과가 있는 것 같습니다.
마음이 가벼워지고, 정신이 좀 다른 곳으로 향하고, 외로움도 조금 덜해지는 느낌입니다.
우리는 고통이 사라졌다고 스스로를 설득합니다.
하지만 다시 고요함이 돌아오고, 그때서야 그것이 치유가 아니라 단지 감각을 무디게 했을 뿐이라는 것을 깨닫습니다.
그리고 감각이 무뎌지는 순간, 고통은 여전히 그 자리에 남아, 인내심 있고 꾸준하게, 우리가 마침내 그것을 직시하기를
기다립니다.
그 순간은 불편하고, 때로는 고통스럽습니다.
왜냐하면 그것은 우리가 피하고 싶어하는 진실을 인정하게 만들기 때문입니다.
하지만 저는 성장이 바로 거기, 즉 다음과 같이 속삭이는 놀라운 깨달음에서 시작된다고 생각합니다.
이건 날 고쳐주는 게 아니야. 단지 나 자신으로부터 날 숨기는 것뿐이야 . 내 주변에서 실제로 무슨 일이 일어나고 있는지로부터 날 숨기는 거야 .
어쩌면 진정한 변화는 바로 거기서 시작될지도 모릅니다.
우리가 외부로 손을 내밀기보다 내면으로 향할 때, 우리가 안식을 쫓기보다 이해를 추구하기 시작할 때,
우리 모두는 자신만의 "안정감을 주는 습관"을 가지고 있습니다.
그 모습은 사람마다 다릅니다.
어떤 사람은 관심을 쫓고, 어떤 사람은 지나치게 성취욕이 강하고, 어떤 사람은 고립되고, 어떤 사람은 집착하고, 어떤 사람은 감정을 무디게 하고, 어떤 사람은 자책하고, 어떤 사람은 가식적으로 행동합니다.
이 중 어느 것도 당신을 나쁜 사람으로 만들지는 않습니다.
그것들은 당신을… 인간답게 만들어 줍니다.
때로는 몸과 마음이 마음이 그 고통을 명명하기도 전에 고통을 감지합니다.
그리고 마음이 아직 속삭이고, 표현 방법을 찾고 있는 동안 우리는 행동합니다.
본능적으로, 자동적으로, 절박하게.
이건 사보타주가 아닙니다.
생존의 문제다.
하지만 아무도 당신에게 말해주지 않는 게 하나 있어요.
안도감은 치유 와 같은 것이 아닙니다 . 안도감은 소음을 잠재웁니다.
치유는 소음의 근원을 묻습니다.
안도감은 당신의 주의를 다른 곳으로 돌립니다 . 치유는 부드럽지만 정직하게 당신을 직면하게 합니다.
안도감은 악순환을 지속시키지만, 치유는 그 악순환을 끊어냅니다.
결국 삶은 당신을 고요한 순간으로 이끌 것입니다.
소음이 사라지고, 주의를 산만하게 하는 것들이 더 이상 통하지 않으며, 마침내 당신이 해왔던 모든 일의 이면에 숨겨진 진정한 질문을 들을 수 있는 그런 순간 말입니다.
내가 실제로 갈망하는 것은 무엇일까?
사랑?
안전?
평화?
명쾌함?
나머지?
하나님?
진실?
폐쇄?
내 자신?
그 답은 당신을 놀라게 할지도 모릅니다.
그것은 당신을 겸손하게 만들지도 모릅니다.
어쩌면 당신을 변화시킬 수도 있습니다.
하지만 그것은 또한 당신을 자유롭게 할 것입니다.
배고픔의 정체를 알 수 있는 순간, 더 이상 부스러기로 배를 채워줄 필요가 없기 때문입니다.
그러니 다음에 도움이 되지 않을 거라는 걸 알면서도 무언가에 손을 뻗으려는 자신을 발견하게 되면, 잠시 멈춰 생각해 보세요.
스스로를 비판하지 마세요.
부끄러워하지 마세요.
그냥 이렇게 물어보세요. "무엇이 아프고, 무엇을 요구하는가?"
반전은 바로 이것입니다.
문제는 스크롤링이나 문자 메시지, 바쁜 일상, 또는 반복되는 감정적 습관이 아니었던 것입니다.
저것들은 그냥… 임시로 넣어둔 거였어요.
진정한 이야기, 진정한 대립, 진정한 각성은 바로 이것입니다:
당신은 그 습관을 갈망한 게 아니라, 치유를 갈망했던 겁니다.
그리고 언젠가, 당신은 마침내 그것을 선택하게 될 겁니다.
그리고 그 순간, 당신이 예전에 그토록 갈망했던 모든 것들이 갑자기 아주 작고 보잘것없게 느껴질 겁니다.
어쩌면 진정한 치유를 경험하고 나면, 다시는 안도감과 평화를 혼동하지 않게 될지도 모릅니다.
테슬라 AI가 라이다를 필요로 하지 않는 이유, 그리고 이것이 모든 자율주행 경쟁업체에게 왜 걱정거리가 되어야 하는가
저는 AI 관련 글을 쓰는 사람으로서, 아이디어 구상, 조사, 초안 작성 및 편집 과정에서 AI 도구를 책임감 있게 활용하면서도, 인간의 감독, 사실 확인 및 최종 편집 권한을 유지합니다.
모든 분석 및 산업 관련 정보는 PCB 제조 및 전자 분야에서의 제 직접적인 경험을 바탕으로 합니다.
2026년 5월 업데이트: 테슬라 FSD v14.3 MLIR 재작성, 최신 주행 거리 수치, 확장된 규제 환경 및 검증 방법론에 대한 새로운 섹션을 반영했습니다.
처음으로 테슬라 오토파일럿에 탔을 때, 저는 지붕에 달려 있는 그 회전하는 센서 덮개를 계속 찾았습니다.
뉴스 사진에서 보셨을 법한, 자율주행 테스트 차량 지붕에 고정되어 있는 원통형 장치 말입니다.
그런데 거기에는 없었습니다.
깔끔한 지붕 라인과 8개의 작은 카메라, 그리고 제가 의식하기도 전에 두 차선을 넘어온 트럭을 감지하고 반응하는 듯한 차량만 있었을 뿐입니다.
그 이미지는 그 이후로 계속 제 머릿속에 맴돌았습니다.
알고 보니 그 사라진 센서가 자동차 업계에서 가장 중요한 기술적 논쟁 중 하나에 핵심적인 역할을 하고 있었고, 그 논쟁을 이해하면 자율주행 기술이 실제로 어디로 향하고 있는지에 대해 많은 것을 알 수 있었기 때문입니다.
LiDAR란 무엇이며, 왜 모두가 LiDAR를 사용하는가?
테슬라가 왜 라이다를 포기했는지 알아보기 전에, 먼저 라이다의 작동 원리를 먼저 살펴보겠습니다.
LiDAR는 Light Detection and Ranging의 약자입니다.
905nm 또는 1550nm 파장의 펄스 레이저를 사용하여(이 두 가지 표준 자동차용 LiDAR 파장 대역) 반사된 펄스의 비행 시간을 측정함으로써 100m 이상의 거리에서도 센티미터 미만의 정밀도로 거리를 계산합니다.
그 결과, 차량 주변의 모든 것(건물, 보행자, 자전거 운전자, 심지어는 피하고 싶은 도로의 움푹 패인 곳까지)에 대한 정밀한 실시간 3D 포인트 클라우드를 생성합니다.
간단히 비유하자면, 박쥐의 반향정위와 더 유사하며, 반사된 펄스로부터 공간 이미지를 구축하는 방식입니다.
하지만 그 물리적 원리는 음향 시스템과는 상당히 다르며, LiDAR의 거리 측정 정확도는 음향적으로는 실질적으로 대응되는 것이 없습니다.
핵심적인 엔지니어링 이점은 직접적입니다.
LiDAR는 주행 시스템에 물리적 공간에 대한 명확한 3D 측정값을 제공합니다.
깊이 추론이 필요하지 않습니다.
레이저가 직접 측정했기 때문에 물체와의 정확한 거리를 알 수 있으며, 소프트웨어가 평면 이미지에서 거리를 추정하는 방식이 아닙니다.
그렇기 때문에 웨이모, 모빌아이, 그리고 테슬라를 제외한 거의 모든 주요 자율주행 프로그램들이 센서 중복성을 활용하는 것입니다.
생명이 걸린 상황에서 센서 중복성은 단순한 과민반응이 아니라, 엔지니어링의 필수 요소입니다.
문제는 무엇일까요? 상용 LiDAR 장치는 과거에는 차량 한 대당 1만 달러에서 7만 5천 달러에 달하는 고가였습니다.
물론 비용은 급격히 하락했습니다.
일렉트렉(Electrek)의 보도에 따르면, 2026년 2월 완전 자율주행을 시작한 웨이모(Waymo)의 6세대 드라이버(Driver)는 5세대 시스템에 비해 하드웨어 비용을 50% 이상 절감했습니다.
이 차량의 센서 시스템에는 비, 눈, 먼지 속에서도 성능을 유지하기 위한 능동형 히터,
와이퍼, 분무기가 포함되어 있습니다.
이는 미국 도로교통안전국(NHTSA)의 테슬라 EA26002 조사에서 지적된 카메라 김서림 문제를 하드웨어 차원에서 해결한 것입니다.
하지만 이러한 센서들은 여전히 고가이며, 일반 소비자 차량에 대량으로 설치하기에는 비현실적입니다.
웨이모의 접근 방식, 그리고 왜 그 방식이 일반적으로 받는 평가보다 더 높은 평가를 받아야 하는지
테슬라를 옹호하기 전에, 웨이모가 무엇을 만들어냈는지 제대로 이해하는 것이 중요합니다.
왜냐하면 웨이모는 그 자체로도 놀라운 기업이기 때문입니다.
Waymo는 SAE 레벨 4 수준의 안전성을 확보하고 있습니다.
이는 Waymo의 로보택시가 운전자 없이 완전 무인으로 운행된다는 것을 의미합니다.
Waymo의 로보택시는 샌프란시스코, 피닉스, 로스앤젤레스, 오스틴, 애틀랜타, 마이애미에서 유료 승객을 태우고 안전 운전자 없이 운행되고 있습니다.
Waymo는 단순한 내부 마케팅 보고서가 아닌, 동료 평가를 거친 안전성 연구 결과를 발표했으며, Waymo의 안전 영향 허브와 2026년
2월 투자 발표에 따르면, 해당 연구 분석 결과는 Waymo가 운영하는 지역 내에서 인간 운전자가 운행하는 차량 대비 부상 관련 사고 발생률이 현저히 낮다는 것을 보여줍니다.
절충점은 운영 설계 영역(ODD)에 있습니다.
ODD는 자율 주행 시스템이 작동하도록 설계 및 검증되는 특정 조건을 의미합니다.
웨이모의 ODD는 지리적으로 제한되어 있습니다.
차량은 미리 매핑된 구역 내에서 운행하며, 주행하는 모든 도로의 고화질 지도가 미리 탑재되어 있습니다.
새로운 공사 우회로가 생기거나 지도에 표시되지 않은 도로가 나타나는 등 상황이 변경되면 해당 지역에서 운행하기 전에 시스템을 업데이트해야
합니다.
새로운 도시로 확장하는 것은 시간이 오래 걸리고 비용도 많이 듭니다.
이는 결함이라기보다는 철학의 차이에 가깝습니다.
웨이모는 검증된 영역 내에서 SAE 레벨 4로 운영하는 것이 모든 곳에서 SAE 레벨 2로 운영하는 것보다 훨씬 안전하다는 점을 주장합니다.
이러한 주장은 일리가 있으며, 안전성 데이터도 이를 뒷받침합니다.
테슬라의 전략: 세상은 눈을 위해 설계되었다
테슬라의 접근 방식은 이 모든 것과 완전히 다릅니다.
그들의 이론은 도로, 표지판, 차선 표시, 브레이크등 모두 인간의 눈에 맞춰 인간이 설계했다는 것입니다.
따라서 자동차가 인간처럼 운전하려면 인간처럼 시각을 통해 세상을 인식해야 한다는 주장입니다.
테슬라의 완전 자율 주행(FSD) 시스템은 차량 주변에 배치된 8개의 카메라를 사용합니다.
트랜스포머 기반 신경망 아키텍처로 구축된 인공지능(AI)은 테슬라가 '점유 네트워크'라고 부르는, 비디오 입력에서 3D 공간 점유 여부를 예측하는 기술을 포함하여, 연속적인 비디오 스트림을 처리하여 물체를 식별하고, 깊이를 추론하고, 행동을 예측하고, 실시간으로 주행 결정을 내립니다.
LiDAR는 사용하지 않으며, 최신 모델에는
레이더도 없습니다.
2021년에 레이더를, 2023년까지 초음파 센서를 제거한 테슬라는 이제 카메라만을 사용하는 시스템에 완전히 전념하고 있습니다.
소프트웨어 스택 또한 빠르게 발전하고 있습니다.
2026년 4월, 테슬라는 FSD v14.3(빌드 2026.2.9.6)을 출시했습니다.
2026년 4월 7일 Electrek이 확인한 테슬라의 공식 릴리스 노트에 따르면, 이 업데이트는 LLVM 프로젝트에서 호스팅되는 오픈 소스 컴파일러 인프라인 MLIR(다단계 중간 표현)을 사용하여 AI 컴파일러와 런타임을 처음부터 다시 작성했습니다.
테슬라는 이를 통해 HW4 차량의 반응 속도가 20% 향상되었다고
주장합니다.
이 20%라는 수치는 테슬라 자체의 검증되지 않은 주장이며, 현재까지 독립적인 제3자 벤치마크 결과는 존재하지 않습니다.
하지만 이러한 아키텍처적 변화는 매우 중요합니다.
MLIR은 엣지 실리콘에서 신경망 실행 방식을 최적화하여 위험 감지와 차량 반응 사이의 지연 시간을 단축시키는데, 이는 NHTSA의 EA26002 조사에서 지적된 바로 그 결함 모드와 관련이 있습니다.
그 전환 과정이 어떠했는지 솔직하게 이야기할 필요가 있습니다.
레이더를 제거하면서 초기에는 FSD 성능이 저하되었습니다.
카메라만 사용하는 초기 모델은 신경망이 따라잡기 전까지 눈에 띄게 성능이 떨어졌습니다.
테슬라는 소프트웨어 개선 속도가 센서 제거 속도를 앞지를 것이라고 예상했고, 대부분의 사용자와 대부분의 상황에서 그 예상은 적중한 것으로 보입니다.
하지만 전환 과정이 순탄했던 것은 아니며,
이러한 접근 방식이 경쟁력을 유지하려면 지속적이고 적극적인 소프트웨어 개발이 필요하다는 점을 다시 한번 상기시켜 줍니다.
이 분야에 처음 접하는 분들을 위해 중요한 한 가지를 더 설명드리겠습니다.
FSD는 완전 자율주행이 아닙니다.
미국 도로교통안전국(NHTSA)의 조사 보고서 PE25012와 SAE 인터내셔널의 J3016 분류 체계에 따르면, 테슬라는 FSD를 SAE 레벨 2 부분 자동화 시스템, 즉 운전자 지원 기능으로 정의합니다.
이 기능에서는 운전자가 항상 운전의 모든 과정을 직접 제어합니다.
따라서 FSD라는 이름은 이상적인 목표를 나타내는
것이지, 적어도 현재로서는 그 기능을 완벽하게 설명하는 것은 아닙니다.
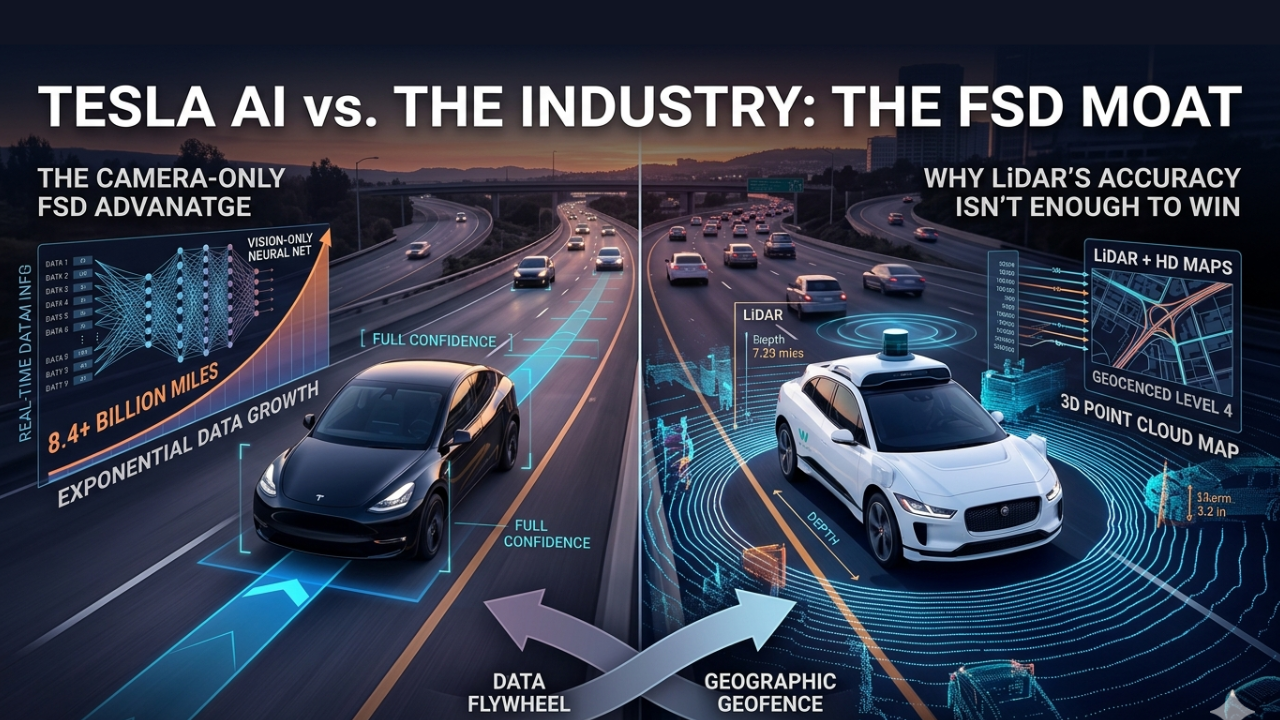
데이터 선순환 구조: 테슬라의 구조적 이점
여기서부터 테슬라의 경쟁사들에게 진정한 흥미진진한 경쟁 구도가 펼쳐집니다.
FSD(완전 자율 주행)가 활성화된 상태로 주행하는 모든 거리는 테슬라의 신경망에 학습 데이터를 제공합니다.
그리고 이러한 데이터 수집 규모는 업계에서 유례가 없습니다.
테슬라 공식 안전 페이지에 따르면, 2026년 5월 기준으로 테슬라의 FSD 관리 차량 누적 주행 거리는 100억 마일을 돌파했으며, 이는 하루 평균 약 2,900만 마일씩 증가하는 수치입니다.
증가 속도는 매우 가파릅니다.
2023년에는 6억 7천만 마일,
2025년에는 42억 5천만 마일, 그리고 2026년 첫 50일 만에 10억 마일 이상이 추가될 예정입니다.
참고로, 웨이모는 자체 안전 영향 허브(Safety Impact Hub)에 따르면 2025년 12월 기준으로 완전 자율주행으로 1억 7,070만 마일(약 1억 7,070만 km)을 주행했습니다.
두 수치 모두 상당한 성과를 나타내지만, 근본적으로 다른 것을 측정합니다.
테슬라의 주행 거리는 인간 운전자가 탑승하여 주의를 기울이고 미세한 오류를 수정하여 연쇄적인 문제로 이어지지 않도록 하는 레벨 2 자율주행입니다.
웨이모의 주행 거리는
인간 운전자의 개입이 전혀 없고, 모든 책임이 웨이모에게 이전되며, 폐쇄 루프 자율주행으로 작동하는 진정한 레벨 4 자율주행입니다.
따라서 두 데이터를 동일한 기준으로 직접 비교하는 것은 기술적으로 오해의 소지가 있습니다.
이것이 바로 선순환 논리입니다.
더 많은 주행 거리 → 더 나은 모델 → 더 뛰어난 시스템 → 더 많은 사용자 → 더 많은 주행 거리. 테슬라의 데이터 세트와 다른 회사들의 데이터 세트 간의 격차는 단순히 큰 것이 아니라, 점점 더 커지고 있습니다.
테슬라는 2026년 1월, 머스크가 안전한 무인 자율주행에 필요한 데이터 양으로 공개적으로 언급한 기준치를 넘어섰습니다.
이 기준치 역시 테슬라가 약속했던 2025년 말까지
무인 자율주행을 구현하지 못하자, 이전에 제시했던 60억 마일 추정치에서 상향 조정된 것입니다.
하지만 플라이휠 논리에는 분명히 밝혀야 할 중요한 단서가 있습니다.
반대편 입장에 대한 정직한 주장
테슬라의 데이터 우위는 분명 사실이지만, 단순히 주행 거리만으로는 모든 것을 설명할 수 없습니다.
그리고 그렇지 않다고 말하는 사람은 무언가를 팔려고 하는 것입니다.
데이터 품질에 대한 논쟁은 타당하며, 구체적으로 살펴볼 가치가 있습니다.
지도 학습에서 훈련 데이터의 품질은 레이블 정확도에 크게 좌우됩니다.
레이블 정확도란 모델에게 주어진 상황에서 어떤 행동이 올바른 행동이었는지 알려주는 정답 신호를 의미합니다.
테슬라의 FSD 주행 거리는 레이블 품질 측면에서 어려운 문제를 제기합니다.
운전자가 직접 운전대를 잡으면, 시스템은 개입이 FSD의 오류 발생 가능성
때문인지, 아니면 운전자가 불안하거나 부주의했거나 단순히 커브길에서 다른 경로를 선호했기 때문인지를 추론해야 합니다.
이러한 모호성은 훈련 신호를 저하시키고, 대규모로 적용할 경우 이를 수정하기 어렵습니다.
웨이모의 전문 운영자들은 문서화된 개입 프로토콜을 준수하여 더 적은 데이터 세트로도 더 정확한 레이블을 생성합니다.
테슬라의 막대한 데이터 양이 이러한 품질 격차를 상쇄할 수 있는지 여부는 머신러닝 연구 커뮤니티에서 활발히 논의되고 있는 주제이며, 아직 확정된 답은 아닙니다.
테슬라의 안전 통계 또한 면밀한 검토가 필요합니다.
테슬라는 FSD(완전 자율 주행) 차량 운전자가 미국 평균보다 중대 충돌 사고를 훨씬 적게 경험한다고 주장하지만, 독립적인 안전 연구원들은 그 방법론에 대해 강력하게 이의를 제기했습니다.
핵심 문제는 테슬라가 최신 안전 기술이 탑재된 신형 차량과 미국 전체 차량(능동 안전 기능이 없는 10년 이상 된 차량 포함)을 비교한다는 점입니다.
훨씬 더 타당한 비교 기준은
동일한 차량에서 FSD가 작동 중일 때와 작동하지 않을 때를 비교하는 것이며, 이 경우 안전 격차가 훨씬 작다는 것을 보여줍니다.
또한 테슬라는 기밀 사업 정보를 이유로 NHTSA(미국 도로교통안전국)에 제출하는 사고 보고서에서 사고 경위를 완전히 삭제하는 유일한 자율주행차 운영업체입니다.
웨이모, 주크스, 오로라, 뉴로는 모두 상세한 사고 보고서를 공개하고 있습니다.
규제 상황은 단순한 조사 이상의 심각성을 보여줍니다.
2026년 3월 18일, 미국 도로교통안전국(NHTSA)의 공식 지정서 EA26002에 따르면, NHTSA는 FSD(완전 자율 주행) 관련 조사를 엔지니어링 분석 단계로 격상했습니다.
이는 NHTSA가 전국적인 리콜을 명령하기 전 마지막 절차 단계로, 약 320만 대의 차량이 대상입니다.
이 조사는 FSD의 카메라 기반 시스템이 햇빛, 먼지, 안개 등으로 인한 시야 저하를 제대로 감지하지
못하는 문제에 초점을 맞추고 있으며, 관련 사고 9건(사망 사고 1건 포함)이 기록되었습니다.
EA26002 문서에 따르면, 테슬라 자체 분석 결과, 업데이트된 감지 시스템이 9건의 사고 중 3건에만 도움이 되었을 것이라고 인정했습니다.
이와 별도로, NHTSA의 예비 평가 PE25012(2025년 10월 개시)에 따라, FSD 장착 차량이 신호 위반, 반대 차선 진입, 역주행 등의 행위를 한 58건의 사고에 대한 두 번째 조사가 진행 중입니다.
일렉트렉의 2026년 2월 23일 보도에 따르면, 테슬라는 8,300건이 넘는 사고 기록을 수동으로 검토하는 데 드는 부담을
이유로 필수 사고 데이터 제출 기한 연장을 두 차례 요청했습니다.
사망자가 발생한 두 건의 연방 수사가 동시에 진행 중이라는 사실은 결코 사소한 문제가 아닙니다.
이는 해당 기술의 현 상태에 대한 중요한 사실입니다.
카메라만을 이용한 접근 방식이 여전히 어려움을 겪는 부분
이 논쟁의 양측 입장을 모두 고려했을 때, 카메라에는 소프트웨어가 완전히 극복할 수 없는 물리적 한계가 분명히 존재합니다.
폭우, 폭설, 짙은 안개는 이미지 품질을 저하시키는데, LiDAR는 특정 조건에서 이러한 문제를 비교적 잘 해결합니다.
905nm와 1550nm 파장은 가시광선보다 레일리 산란이 적기 때문입니다.
하지만 LiDAR도 날씨의 영향을 받지 않는 것은 아닙니다.
폭우, 짙은 안개, 젖은 도로의 에어로졸은 후방 산란 노이즈, 다중 경로 간섭, 신호 감쇠를 유발하여 포인트 클라우드 품질을 크게 저하시킵니다.
카메라에 비해 LiDAR의
장점은 실제적인 것이며, 상황에 따라 달라지는 것이지 무조건적인 장점은 아닙니다.
웨이모의 6세대 하드웨어는 테슬라의 카메라 전용 방식으로는 구조적으로 구현할 수 없는 능동형 센서 클리닝 시스템을 통해 이러한 문제를 직접적으로 해결합니다.
아무리 정교한 신경망이라 할지라도 2D 이미지에서 깊이를 추론하는 것은 직접적인 3D 측정보다 불확실성이 더 큽니다.
또한 테슬라의 카메라에는 LiDAR에는 없는 취약점이 있는데, 더러운 앞유리, 김서림, 또는 도로 먼지 얼룩이 시스템 성능을 크게 저하시킬 수 있다는 것입니다.
이는 이론적인 반론이 아니라, 미국 도로교통안전국(NHTSA) 조사에서 실제로 발생한 문제점으로 지적된 사항들입니다.
NHTSA 엔지니어링 분석 보고서 EA26002에 따르면, 테슬라의 카메라는 실제 발생한 사망 및 부상 사고에서 햇빛 눈부심, 먼지, 공중 장애물을 감지하지 못했습니다.
테슬라 자체 분석에서도 업데이트된 감지 시스템이 9건의 사고 중 3건에서만 도움이 되었을 것이라고 인정했습니다.
아무도 충분히 크게 이야기하지 않는 검증 문제
주행거리는 모두가 언급하는 지표이지만, 안전 인증을 결정하는 지표는 아닙니다.
자율 시스템 엔지니어링에서 중요한 검증 기준은 누적 주행 거리가 아니라, 자율 주행 해제 심각도 비율, 위험 이벤트 간 평균 거리, 운영 설계 영역(ODD) 적용 범위, 그리고 드문 이벤트에 대한 극한 상황 성능입니다.
인간 운전자가 미세한 편차를 지속적으로 수정하여 고장으로 이어지지 않도록 하는 100억 마일 규모의 지도 학습 데이터셋은 인간의 안전망이 제거된 상황에서 AI 모델이 폐쇄 루프 안정성을 유지할 수 있음을
증명하지 못합니다.
모델은 인간의 운전 행동을 학습하지만, 견고한 자율 복구 행동을 학습하는지는 별개의 문제이며 아직 해결되지 않은 과제입니다.
이 기사에서 충분히 다루지 않은 사이버 보안 측면도 있습니다.
인터넷에 연결된 자율주행 차량은 순수한 AI 확장성만으로는 해결할 수 없는 공격 표면을 가지고 있습니다.
OTA 업데이트 무결성, 센서 스푸핑 취약점, GNSS 재밍, 그리고 LiDAR에는 영향을 미치지 않으면서 카메라 기반 인식 시스템을 속일 수 있는 적대적 입력 등이 그 예입니다.
테슬라 차량은 Pwn2Own Automotive와 DEF CON 자동차 빌리지에서 여러 차례
공격 사례가 공개되었습니다.
카메라가 유일한 인식 계층인 비전 전용 시스템의 경우, 적대적 공격에 대한 내성은 단순한 이론적 문제가 아니라 안전에 매우 중요한 엔지니어링 요구 사항입니다.
하지만 테슬라를 비롯한 자동차 업계는 아직 이 문제에 대해 명확한 해답을 내놓지 못하고 있습니다.
그렇다면 이 모든 것은 실제로 무엇을 의미하는 걸까요?
이 문제에 대해 오랜 시간을 들여 고민한 결과, 제 결론은 두 접근 방식 모두 타당하며, 결과적으로 어느 한쪽이 모든 것을 독식하는 식의 승부가 되지는 않을 것이라는 겁니다.
웨이모는 중요한 사실을 입증했습니다.
바로 지리적 경계 설정 기능과 풍부한 센서를 갖춘 SAE 레벨 4 등급의 로보택시가 실제 도시에서 실제 유료 승객을 태우고 운행될 수 있으며, 독립적인 검증에도 견딜 수 있는 투명성을 보유하고 있다는 것입니다.
웨이모는 2026년 2월 투자 유치 발표에서 2025년 한 해에만 1,500만 건의 운행을 달성하고 누적 운행 횟수 2,000만 건을 돌파할 것이라고 밝혔으며, 1,260억 달러의 기업
가치로 160억 달러의 투자를 유치했습니다.
웨이모의 신중하고 체계적인 접근 방식은 안전에 대한 확고한 신념을 반영하며, 단순히 확장 속도가 느리다는 이유만으로 그 가치를 간과해서는 안 됩니다.
테슬라는 기존과는 다른 무언가를 증명해냈습니다.
트랜스포머 기반 신경망으로 구축된 비전 기반 시스템만으로도 수십억 건의 다양한 실제 주행 시나리오를 학습하여 일반인들이 기꺼이 구매하고 매일 사용할 만큼 뛰어난 주행 성능을 발휘할 수 있다는 것을 보여준 것입니다.
데이터 선순환은 실제로 존재하며, 개선 곡선은 가파르고, 하드웨어 비용 우위는 구조적인 강점입니다.
그리고 100억 마일(약 160억 km)이라는
이정표는 대부분의 분석가들이 예상했던 것보다 빠른 2026년 5월에 달성되었는데, 그 와중에도 두 건의 연방 안전 조사에서 사망 사고가 기록되었습니다.
이 두 가지 사실이 모두 동시에 실현된 것입니다.
양측 모두 아직 완전히 답을 내놓지 못한 질문, 즉 라이다의 직접적인 비행시간 측정 없이 카메라만으로 모든 운영 설계 영역(대부분뿐 아니라)에서 진정으로 안전한 무인 자율 주행을 달성할 수 있는지 여부는 여전히 미해결 과제로 남아 있습니다.
주행 거리 누적은 이 질문에 대한 답을 찾는 데 필요한 요소 중 하나입니다.
검증 방법론, 센서 중복성, 사이버 보안의 견고성, 그리고 적대적 환경에서의 폐루프 안정성 또한
중요한 요소입니다.
그 답을 알기까지는 아직 몇 년이 더 걸릴 겁니다.
언젠가 눈보라 속에서 운전대를 놓고도 차가 완벽하게 주행한다면 그때 가서 생각해 보죠. 하지만 솔직히 말해서, 우리는 지금 두 가지 중대한 경쟁이 실시간으로 펼쳐지는 것을 지켜보고 있고, 두 경쟁 모두 대부분의 사람들이 생각하는 것보다 훨씬 더 진전된 상태입니다.
지붕에 설치된 센서 자체가 핵심은 아니었습니다.
문제는 항상 그 센서를 뒷받침하는 소프트웨어가 충분히 뛰어난가 하는 것이었죠. 이제 그 답을 거의 찾아냈습니다.
이 8가지 CSS 실수를 그만하세요 — 모든 코드베이스에서 발견됩니다

깔끔하고 유지보수하기 쉬운 CSS를 작성하는 것은 기능 출시를 서두르다 보면 종종 간과되는 예술입니다.
숙련된 개발자조차도 "CSS 부채"로 이어지는 습관에 빠지곤 하는데, 이는 단 하나의 여백을 변경하는 것만으로도 서로 관련 없는 세 페이지가 제대로 작동하지 않게 되는 상황을 말합니다.
다음은 최신 코드베이스에서 흔히 발견되는 CSS 오류 8가지와 그 문제점, 그리고 해결 방법입니다.
1. 레이아웃 및 타이포그래피에 절대 단위(px) 사용
글꼴 크기나 컨테이너 너비에 픽셀(px) 단위를 사용하는 것은 접근성과 반응형 디자인을 무너뜨리는 가장 빠른 방법입니다.
픽셀은 고정된 값이므로 사용자의 브라우저 설정이나 기기의 화면 비율을 고려하지 않습니다.
- 실수: 글꼴 크기: 16px; 또는 너비: 800px ; 와 같이 하드코딩하는 것 .
- 해결 방법: 타이포그래피에는 rem 단위를 , 레이아웃에는
em, %, vw/vh 또는 ch 단위를 사용하세요 . 이렇게 하면 사용자가 브라우저의 기본 글꼴 크기를 늘리더라도 레이아웃이 비례적으로 확대/축소됩니다.
/* 나쁜 예 */ .sidebar { width : 300px ; font-size : 14px ; } /* 좋은 예 */ .sidebar { width : 20rem ; font-size : 0.875rem ; }
2. 과도한 의존!important
` !important` 플래그는 최후의 수단입니다.
이 플래그를 사용하여 특정성 싸움에서 승리한 후에는, 나중에 이를 무효화하는 유일한 방법은 또 다른 `!important` 플래그를 사용하는 것뿐입니다.
이는 마치 "특정성 군비 경쟁"을 만들어내는 것과 같습니다.
- 실수: 선택자가 충분히 "강력하지 않다"는 이유로 스타일을 강제 적용하기 위해 !important를 사용하는 것 .
- 해결 방법: 적절한 CSS 우선순위를 사용하거나 CSS 캐스케이드 레이어( @layer )를 사용하세요. 만약 `!important` 를 사용해야 한다면 , 일반적으로 CSS 구조가 제대로 정리되지 않았다는
신호입니다.
3. CSS 변수(사용자 지정 속성)를 사용하지 않음
#3b82f6 과 같은 16진수 코드를 모든 곳에 하드코딩하면 나중에 대규모 "찾기 및 바꾸기" 작업을 거치지 않고는 "다크 모드"를 구현하거나 브랜드 색상을 변경하는 것이 불가능합니다.
- 실수: 색상 코드와 간격 값을 도면 전체에 마구잡이로 뿌려놓는 것.
- 해결 방법: ` :root` 테마를 정의하세요 .
:root { --primary-color : #3b82f6 ; --spacing-md : 1rem ; } .button { background-color : var (--primary-color); padding : var (--spacing-md); }
4. 박스 모델 무시 (패딩 vs. 마진)
margin 과 padding을 혼동하면 종종 "레이아웃 해킹"으로 이어집니다.
초보자들은 클릭 가능한 영역을 넓히기 위해 margin을 사용하는 경우가 많은데, margin이 요소의 클릭 박스 바깥에 위치하기 때문에 이러한 방법은 효과가 없습니다.
- 흔히 저지르는 실수: 내부 간격에 margin을 사용 하거나 외부 간격에 padding을 사용하는 것.
해결책: 기억하다: 심 테두리(시각적 배경) 내부에 있습니다. 여유 테두리(요소 간 간격) 밖에 있습니다.
또한 항상 설정됩니다.박스 크기 조정: 테두리 박스; 패딩으로 인해 요소의 전체 너비가 증가하지 않도록 합니다.
5. 고정 높이 사용
`height: 500px;` 로 설정하는 것은 재앙을 초래할 수 있습니다.
컨테이너 내부의 콘텐츠가 커지면(예: 텍스트가 추가되거나 화면 폭이 좁아지면) 콘텐츠가 넘쳐흘러 다른 요소와 충돌하게 됩니다.
- 흔히 저지르는 실수: 용기의 높이를 고정시키는 것 .
- 해결 방법: min-height 속성을 사용 하거나 콘텐츠 자체에서 높이를 정의하도록 하세요. 이렇게 하면 컨테이너가 필요에 따라 자연스럽게 확장됩니다.
/* 좋지 않음 - 내용이 너무 길면 넘칠 수 있습니다 */ .card { height : 200px ; } /* 좋음 - 카드는 최소 200px 높이를 유지하지만 필요에 따라 확장될 수 있습니다 */
.card { min-height : 200px ; }
6. "좀비" CSS 작성 (깊은 중첩 구조)
CSS 선택자가 `.nav`, `.container`, `.row`, `.col`, `.button` 과 같은 형태라면 , 취약한 코드를 작성하고 있는 것입니다.
깊은 중첩 구조는 스타일 재사용을 거의
불가능하게 만듭니다.
- 실수: HTML 구조와 정확히 일치하도록 선택자를 중첩하는 것.
- 해결 방법: BEM(블록 요소 수정자) 과 같은 명명 규칙을 사용하세요 . 이렇게 하면 클래스의 특수성을 낮추고 클래스 자체가 클래스의 의미를 명확하게 설명해줍니다.
/* 나쁜 예 */ .footer .nav li a { color : blue; } /* 좋은 예 (BEM) */ .footer__link { color : blue; }
7. 스타일 복제 (DRY 원칙 미준수)
하나의 파일에 `display: flex; align-items: center; justify-content: center;` 와 같은 코드를 열 번 작성하는 것은 비효율적입니다.
- 실수: 유사한 요소에 대해 코드 블록을 반복해서 사용하는 것.
- 해결 방법: 유틸리티 클래스를 만들거나 CSS 컴포지션을 사용하세요. Sass와 같은 전처리기를 사용하는 경우 `@extend` 또는 `@mixin`을 사용하세요 . 최신 CSS에서는 공통 스타일을 하나의 클래스 아래에 그룹화하면 됩니다.
8. "콘텐츠 없음" 또는 "긴 콘텐츠"를 고려하지 않고 디자인하기
많은 개발자들이 카드 디자인에 제목 크기를 완벽하게 맞춥니다.
하지만 제목이 세 줄이나 되는 경우에는 어떻게 해야 할까요? 또는 이미지가 없는 경우에는요?
- 흔히 저지르는 실수: 오직 "행복한 경로"만을 고려해서 디자인하는 것.
- 해결 방법: 텍스트 오버플로우(text-overflow: ellipsis;) 와 이미지의 경우 객체 맞춤(object-fit: cover;)과 같은 CSS 속성을 사용하고 , 데이터가 없는 컨테이너를 숨기려면 `:empty` 의사 클래스를 사용하세요.
/* 긴 텍스트로 인해 레이아웃이 깨지는 것을 방지합니다 */ .title { white-space : nowrap; markmoverflow : hidden; text-overflow : ellipsis; }
결론
CSS는 배우기는 쉽지만 마스터하기는 어렵습니다.
다음 여덟 가지 실수를 피하면 단순히 "보기 좋게 만드는 것"을 넘어, 향후 수년간 유지보수가 용이한 견고하고 전문적인 시스템을 구축할 수 있게 됩니다.